D. ロボットのしくみを理解する 〜書道ロボットを作ろう〜
人間のように動く「ロボット」の開発は,人類の夢のひとつです。
その研究の進歩は目覚しく,今では,歩き・踊るロボットが当たり前のように登場する時代になりました。
そのようなロボットの基本的な構造や動作原理について,皆さんに理解してもらうのがこの実験の趣旨です。
さて,実際に皆さんに触れてもらうのは,図1のような「人の腕」を模したマニピュレータ・タイプのロボット(ロボットアーム)です。
このロボットにコンピュータから指令を送って自在に操り,筆で文字を書く「書道ロボット」を作りましょう。

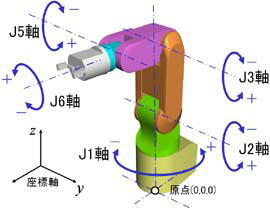
図1 書道ロボット 図2 マニピュレータの構造
マニピュレータ(ロボットアーム)は,図2のような構造になっています。
J1〜J6(J4を除く)までの5つの関節を持ち,先端には開閉ができるハンドが付いています。

図3 実験装置の構成
今回使う実験装置は,図3のように,大きくわけて3つの部分から構成されています。
まず,ロボット本体である「マニピュレータ」,皆さんが動作指令を送るための「パソコン」,そして,その両者を仲介する「コントローラ」です。
ロボットは,図の矢印で示すような信号をやり取りしながら稼動します。
それぞれの関節やハンドに対して動作指令を与えることで,ロボットに様々な動きをさせることができます。
ロボットに動作指令を与えるには,例えば次のような命令(コマンド)をロボットに送ります。
1. 「GO」... ハンドのグリップを開く。
2. 「MS」... 指定した位置にハンドの先端を直線移動する。
3. 「MR」... 指定した3点を結ぶ円弧を描く。
他にも多くのコマンドが用意されています。
また,工業用のロボットにおいても,これらと同様のコマンドが用いられています。
皆さんもこれらのコマンドを駆使してロボットに思い通りの動きをさせ,美しい文字を書かせて「達筆」を競い合いましょう!